Good news for this update, or at least some of it is. I found a serviceable crankshaft and it has been shipped to the engine shop. With any luck the engine build will start going full throttle next week.
The treasure hunt
In my last update, I’d mentioned that the left engine crankshaft was unserviceable, and that I’d have to find a new one. Before that post, I had already called a dozen or so places that I thought might have one, but I struck out. On a whim that afternoon, I decided to call one of the engine shops that I did not use for the overhaul. They have a good reputation for stocking a lot of various parts and I thought maybe I would get lucky and find that they had one on the shelf. The next morning, and mind you this was a Saturday, I got an email from them. They had a factory-new crankshaft! I was happy.
The following Monday while I was at lunch I got a phone call from that shop. It turns out that the box was marked as containing an IO-470-L crankshaft. When they opened it, it turned out that it actually contained an IO-470-D crankshaft. This may seem like a small difference but in terms of mechanical compatibility it is huge. I went from being elated to have solved my crankshaft problem to being depressed that my last attempt had struck out and I resigned myself to having to wait a few more months to find one on the shelf.
The next morning I saw a post from someone on BeechTalk looking for a pilot to fly a pressurized Baron 58 for a maintenance check flight. I couldn’t do it, but I sent the poster a private message to suggest someone who might be able to help. We struck up a conversation and he ended up referring me to Nagle Aircraft, a maintenance shop in Massachusetts that I had never heard of. I called and spoke to Joe Nagel and he could not have been more helpful. He referred me to a gentleman named Tim Hess who runs the engine shop at the same airport. Tim was equally helpful and said, “I don’t have any, but here are a list of three people who might.” I struck gold on the second of those three, a small parts shop called ENParts in Lancaster, Texas, run by a lady named Eileen McGough.
The funny part was that if I had done a little more research I probably would have run across ENParts sooner because they are a well-known reseller of pieces and parts for situations like this. They have a primitive website, but other better-known websites like CSOBeech mention them. So the lesson I learned was that being more diligent about researching parts suppliers might have saved me some unnecessary angst. After a few back and forth phone calls, we established that the crankshaft Eileen had would be usable, but that would require new connecting rods for the upgraded pistons that I am installing. That matter was all settled relatively quickly, and the crankshaft is now on its way to its new home in my left engine.
During this process, I got a note from the shop that pointed out another opportunity to spend money something that needed to be considered while the plane was down for the overhauls.
Baffles
If you know how car engines work, then you know they are typically cooled by water or coolant that circulates through a radiator. Air passing over the radiator cools the fluid, which is then pumped through channels in the engine assembly to keep it cool. Very few airplane piston engines are liquid cooled. Instead, they tend to be air cooled, but not with the same forced air mechanism that cars use. Drag increases with the square of the surface area, so if you make a big enough opening to force air in, you’re going to multiply the amount of drag disproportionate.
Instead, most piston engines use what’s known as pressure cooling. Air enters the front of the engine cowling, sure, but a system of baffles and seals blocks the air’s free flow so that a higher-pressure zone is created over the top of the engine. The passage of air over the lower part of the nacelle creates a low-pressure area that draws the hot air out and down. There are baffles between each cylinder, and there are multiple baffles that go between various parts of the engine installation and the cowling. In the image below, the blue stuff is the flexible baffle material that forms an air-tight-ish seal against the cowling; it’s riveted to a support bracket that holds it in place. You can’t see the inter-cylinder baffles well from this angle.

My baffles were installed new when the engines were overhauled in 2004. Some of the rubber materials were cracked, as were some of the attachment brackets. The best time to install new baffling is when the engine is out, because otherwise it’s tough to get the inter-cylinder baffles in place properly.
The supply chain rears its ugly head again
As it turns out there are basically two places to get baffles for a Baron 55.
One is from a company called McFarlane that has what the FAA refers to as “parts manufacturing authority,” or PMA. PMA means that you have their permission to produce parts that are functionally identical to what came from the original manufacturer. They don’t necessarily have to be made using the same process or out of the same materials, but they have to work the same way and meet the same standards for durability and so on. The other is from a company named D’Shannon Aviation, which makes a variety of really nifty upgrades for various Beechcraft airplanes. I have a D’Shannon windshield, vent window, and vortex generators and have been very pleased with them. Their modifications are made available through a different mechanism known as a supplemental type certificate, or STC. Why it’s called that, and what it means, are topics best left for another post.
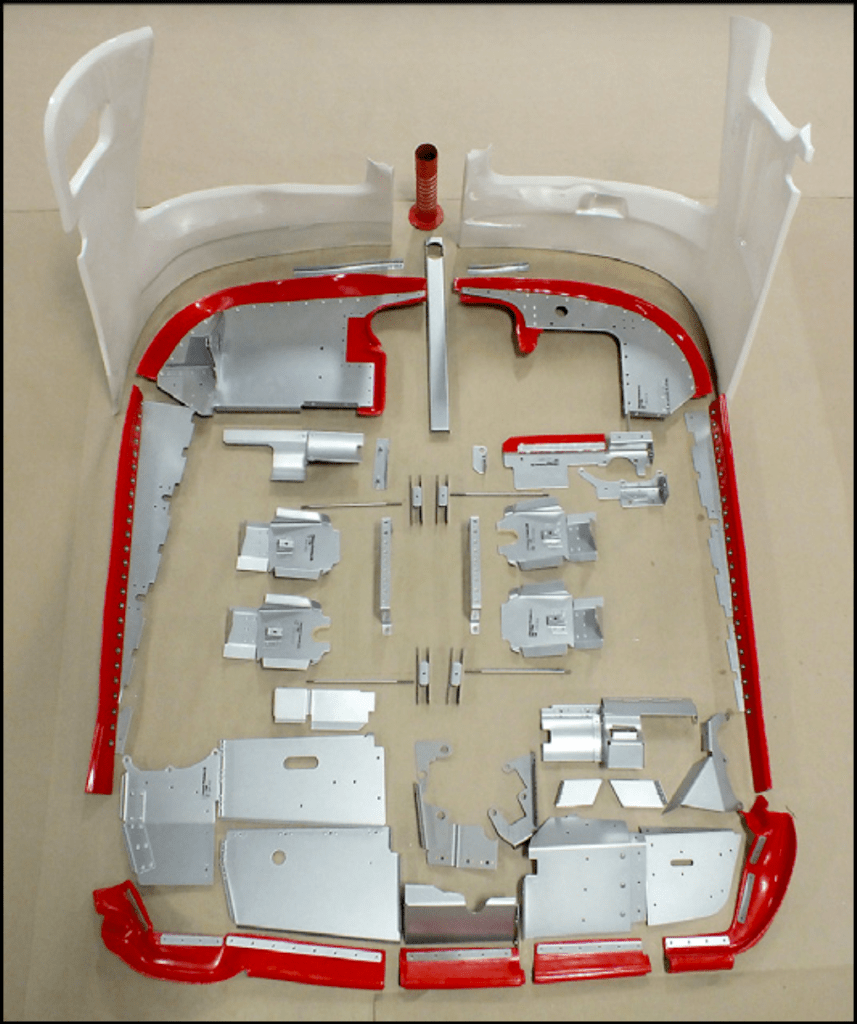
There should be no functional difference between the two and McFarlane’s parts were about 20% cheaper than the ones from D’Shannon. That might make it seem obvious which one I should choose. As it turns out though, McFarland has a minimum 60 day lead time whereas D’Shannon has baffles sitting on the shelf ready to ship. made the decision dramatically easier. Scott and Heather, the owners, were incredibly quick and helpful in processing my order, with the bonus that they were able to break the kit into two subassemblies; the parts that go on the engine are going to the engine shop, and the parts that go on the airframe are headed to New Smyrna Beach to be installed. The screenshot below from D’Shannon’s baffle kit documentation shows all of the pieces and their relative locations (although note that mine are blue and not red!)
…and now, back to waiting
I’d budgeted for the possibility that I would need one new crankshaft. I didn’t budget specifically for the baffles, but I did keep some contingency money aside in case something like this happened. From a budget standpoint I am not too badly off. From a time standpoint the delay in getting a crankshaft added a couple more weeks to the schedule. But at this point it’s hard to act like that matters too much given how long this is already taken. I am hopeful now that all of the parts are in the correct places. That the engine build itself will go smoothly…but I am mentally preparing myself for some other kind of unexpected delay at some point. We shall see.