For a while now, I’ve been waiting for a new update to the GPS software in my airplane. The last major update was about two years ago, so it was about that time. Avidyne had originally planned to release this set of features as version 10.3, but it turns out that, for some mysterious reason, the FAA update process for a “major” update applies to a version update. So releasing the software as 10.3 would have required a longer certification cycle than releasing the same thing as 10.2.3.1, which makes very little sense to me given that this update touched literally every part of the IFD’s firmware and software.
After the software was finally done, Avidyne had just submitted the software for certification and… government shutdown.
Then they decided to do a separate release just for the GPS week-number rollover bug. That update could be released nearly immediately, but it didn’t include any new features. However, like all software updates for avionics in certificated airplanes, you can’t just plug in a USB stick and go; updating the software is considered to be an alteration and so requires a logbook entry signed by a certificated airframe & powerplant (A&P) mechanic. Rather than make a separate trip just for the GPS fix, I elected to wait until the full release was ready, and so when it dropped last week I immediately emailed the shop to make an appointment.
As with every other software product, this update was a combination of bug fixes and some new features. The new features that I was most interested in were the ability to stream ADS-B data from the IFD to Foreflight and the ability to load instrument arrival and departure procedures without a transition. Here’s how my first flight with it went.
First, I preflighted and flew the short hop from Decatur to Tullahoma, Tennessee, where XP Services is located. XP is a great shop: they are quick, efficient, and they do good work. When I pulled up to the hangar, the tech already had the installation instructions printed and a GPU cart waiting, which is mighty fine service for a Friday afternoon before a 3-day weekend. I went into their conference room to work while the mechanics worked through the long install procedure. It requires continuous power to the GPS, along with a bunch of separate reboots and firmware updates. The instructions have a lot of dire warnings in bold red type. I’d certainly have been capable of doing the update myself but I liked the security of having the shop do it so that I wouldn’t make a stupid mistake that bricked the unit.
The update went fine; they billed me for 1.61 hours (oddly specific, but OK, whatever) All of my settings were properly preserved, and immediately after the update I was able to load the 23 May navdata cycle without incident. I happily flew home $156 poorer but eager to see what the update brought.
Last year, the FAA announced that they would start sending additional weather data over the FIS-B data link protocol. I have a box (the SkyTrax 100) that is essentially a modem; it receives ADS-B data (which includes FIS-B weather), demodulates it, and passes it as a stream to the IFD. That box didn’t require any updates to display the new weather data (which includes lightning strike, icing, and cloud-height data) but the IFD couldn’t interpret it until this update. I really wanted the lightning data for the summer and the icing data for the winter— both of these are important cross-checks that help clarify what’s really happening inside the clouds. Once I was airborne and established, I was able to see lightning data in some storm cells off to my west, so that part of the update clearly works. The weather was sunny and clear for probably 200nm around me, so there wasn’t much else to see.
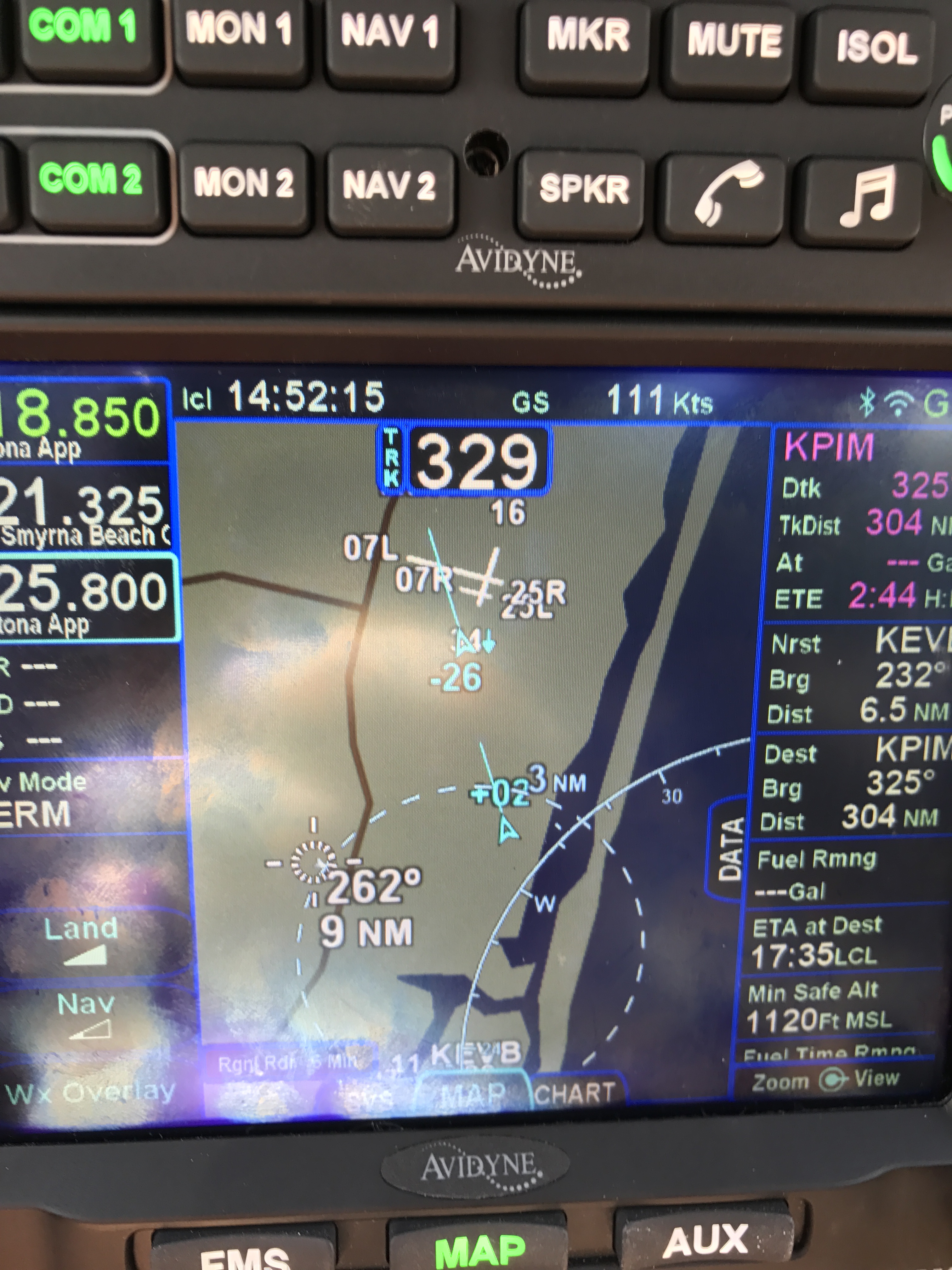
The other major feature I wanted was integration with Foreflight. Since early in its life, the IFD series has been able to wirelessly connect to external devices to upload and download flight plans, send GPS position data, and send ADS-B streams. The idea is that if you’re using a tablet app like Foreflight or FlyQ, you can use your panel-mounted GPS and ADS-B receiver to feed position, weather, and traffic data to the tablet app. For a variety of boring technical reasons that I won’t go into here, ADS-B streaming hasn’t worked properly with Foreflight until this release (although GPS position streaming and flight plan up/download did work). Now it does— those little blue arrows are other aircraft, and the radar display is live FIS-B data (including lightning data). I was also able to look at the icing level forecast, which is going to be invaluable in the wintertime for tactical weather avoidance.

There’s one thing that Avidyne took away in this update, though. They previously had an aural “traffic!” announcement that was triggered when the IFD detected traffic within a certain radius. The unit still gives you a visual indication, but no more audio prompt— having it violated some FAA standard or other. However, I was happy to see that Foreflight provides audible traffic callouts based on data from the IFD– so now I probably need to decide whether it’s more valuable to have my phone or iPad connected to the AMX240 during flight.
The second thing I wanted was the ability to load arrival or departure procedures that don’t have a transition. This requires a bit of explanation. These procedures (SIDs for departures and STARs for arrival) specify a route for how you arrive at or depart from the airspace near an airport— they provide a way to transition between the terminal environment and the en route environment. For example, see this plate for the SWTEE.1 arrival procedure, which is used in Atlanta airspace to handle aircraft arriving from the west and slotting them into the correct flow for whatever airport they’re going to. ATC will usually assign the arrival while you’re still en route, and they may or may not assign a transition. For example, they could give me BIZKT.SWTEE1 (pronounced “biscuit transition for the sweet tea 1 arrival”) or LPTON.SWTEE1. So the IFD expects you to specify a transition point when you load a SID or STAR. The problem is, sometimes you don’t get one assigned from ATC (and you can’t just make up your own). When I fly in from north Alabama, my direct route will normally take me north of those routes, so typically when I’m somewhere just northwest of RMG, ATC will call me and amend my route to give me something like “direct OKRAA, thence the SWTEE1 arrival”. It’s simple enough to load the STAR and then sequence the leg I want, but keep in mind that the flight management system (FMS) in the IFD is always expecting that you’re telling it what waypoint to fly to next— so any time you have to change waypoints or insert a gap in your route, you need to be extra careful. The 10.2.3.1 update solves this problem by allowing you to load a SID or STAR with no transition, so you can just go direct to whatever waypoint ATC gives you. Simpler, with fewer opportunities to make a mistake.
Even though this update took a little longer than I would have liked, I was delighted to see how well it worked and I look forward to racking up a bunch more hours flying behind it this summer.