Pet owners talk about “gotcha day”: the day when a new pet joins the family. We use it in lieu of “birthday” because, as the keeper of 2 rescue beagles and a rescue cat, of course I don’t know their actual birthdays.
Yesterday was a gotcha day too: four years since I picked up Carmen, my 1968 Beech Baron 55, and it seems like a good time to reflect on what I’ve learned since that day I flew her home from Dallas.
(If you’re new here: the name “Carmen” came from my sister. I told the family I was flying to San Diego to look at a plane, and she immediately came back with “Carmen Sandiego… because where in the world…” and the name stuck.) I liked it enough to have stickers made, so I can leave them in breweries, bars, FBOs, and other places where people tend to leave “Kilroy was here”-style stickers. (It is no accident that the woman in the picture looks like my lovely wife cosplaying as Carmen, btw.)

The airplane as teacher
When I got my multi-engine rating in 2021, flying a 1967 Travel Air, I thought I had a pretty solid understanding of how twins work. I was wrong — or at least, incomplete. Owning a twin is a different kind of education entirely. The Travel Air and the Baron are siblings so they are similar in many ways, but the level of knowledge and investment of time and money required to move from flying a flight-school mule to your own airplane is very significant.
Four years in, I’m still learning. Every time something breaks, every time I research or buy an upgrade, every inspection I do or have done: they all teach me something new about the airplane’s systems. Working alongside the mechanics, looking at the guts of a 58-year-old airplane, is a kind of continuing education you can’t get from a textbook. I’ve gotten to know the plane and engines well enough to have opinions about things I barely even know existed when I started.
The people you find along the way
One high note of owning this plane has been the chance to meet new people.
I want to start by recognizing David Peterson, who sold me the airplane and did my transition training. Great guy who handed me a well-maintained, solid airplane and has always been there to answer my often-ignorant questions.
The online Beech community has been a constant bright spot. The folks on BeechTalk have been generous with advice — route suggestions, maintenance tips, and the occasional nudge in a useful direction. To cite one of many examples, when I posted about a planned Niagara Falls trip, a couple of people recommended stopping at Latrobe, PA to eat at DeNunzio’s — the kind of local knowledge you only get from a broad community like that.
Training with different instructors has been invaluable too. I practiced emergency procedures extensively with my friend Brian Fredrickson (who has since started a very successful flight school), and had the great experience of flying with Anand Iyer to train for my commercial multi-engine rating, which I earned in 2024.
During this stretch of time, though, I’m sorry to say I lost two friends: Nikul Desai was a fellow pilot and multi-engine instructor killed in a training accident, and Jon Foote took great care of the Baron for me at Elevation Flight until his untimely death.
Going places
One of the best reasons to buy an airplane is to use it to go places. A big part of my reason for buying a twin was so I could comfortably fly over water, mountains, and other places where a single-engine plane might leave me as an involuntary glider pilot.
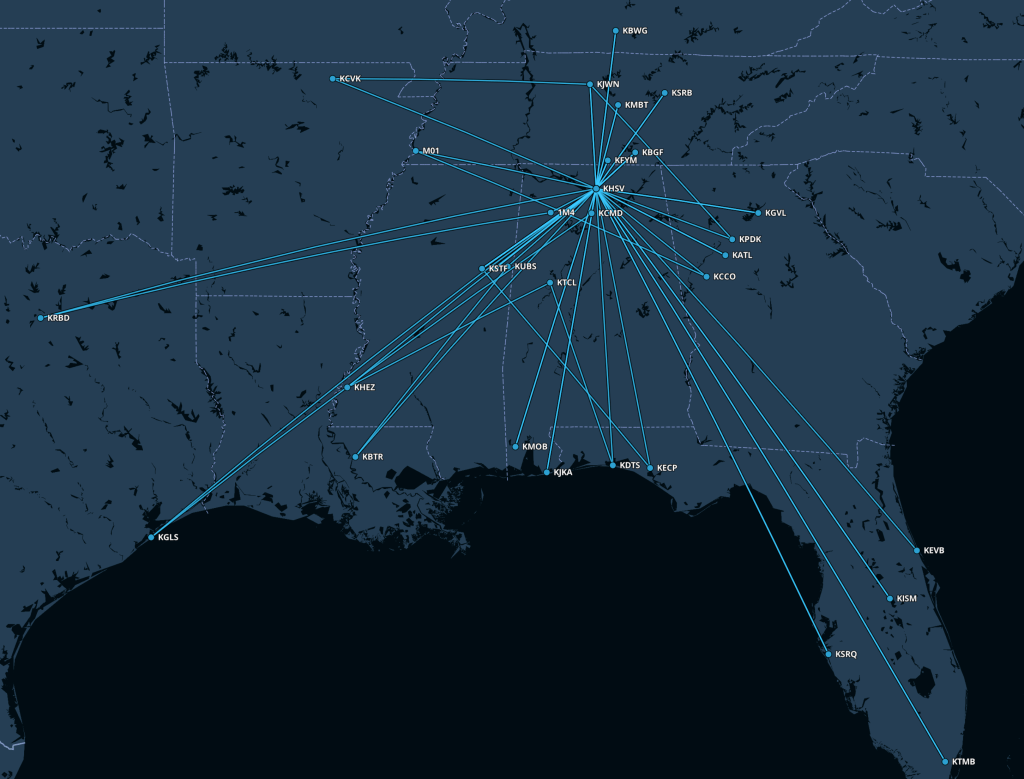
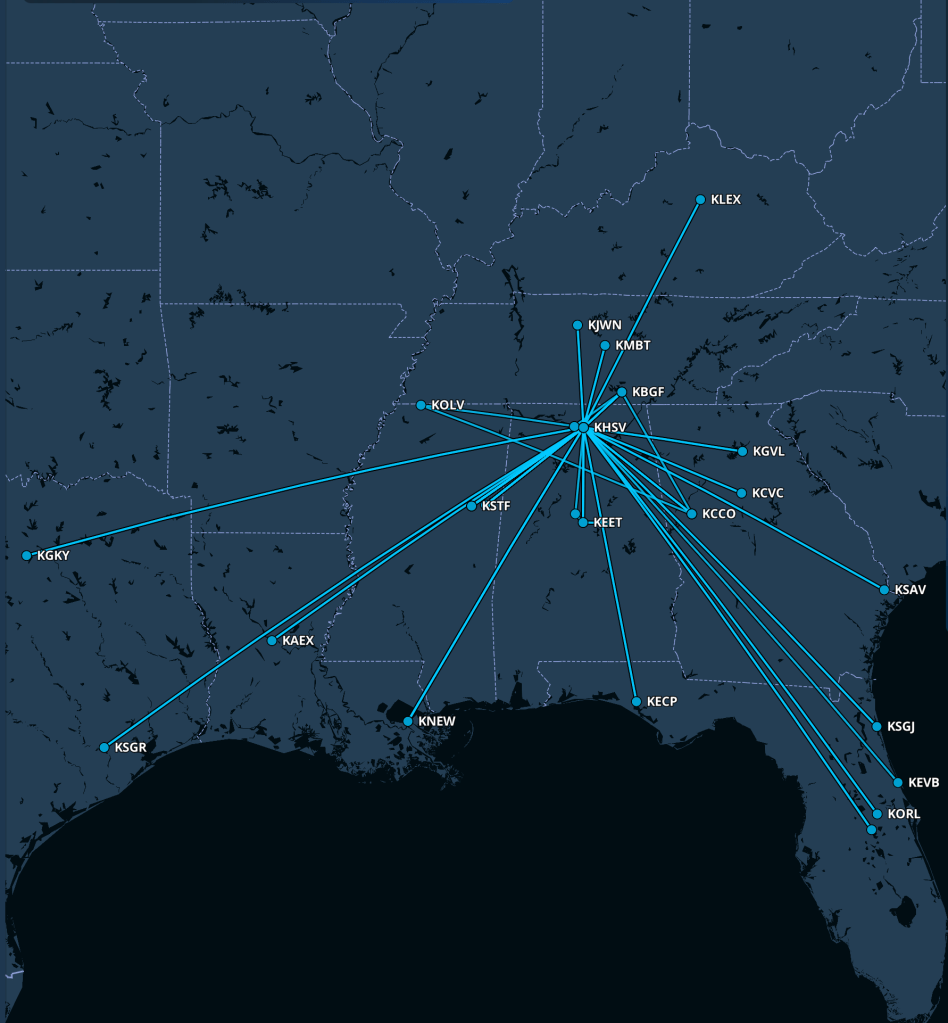
Carmen has taken us to some wonderful places over these four years. Fall break 2023 was Niagara Falls with a side trip to Vermont to see my sister and her family. The Baron has about 5 hours of range including IFR reserves, but for everyone’s comfort I prefer a maximum stage length of about 3.5 hours, which meant a fuel stop somewhere in the mid-Atlantic. We’ve been to all sorts of interesting places…
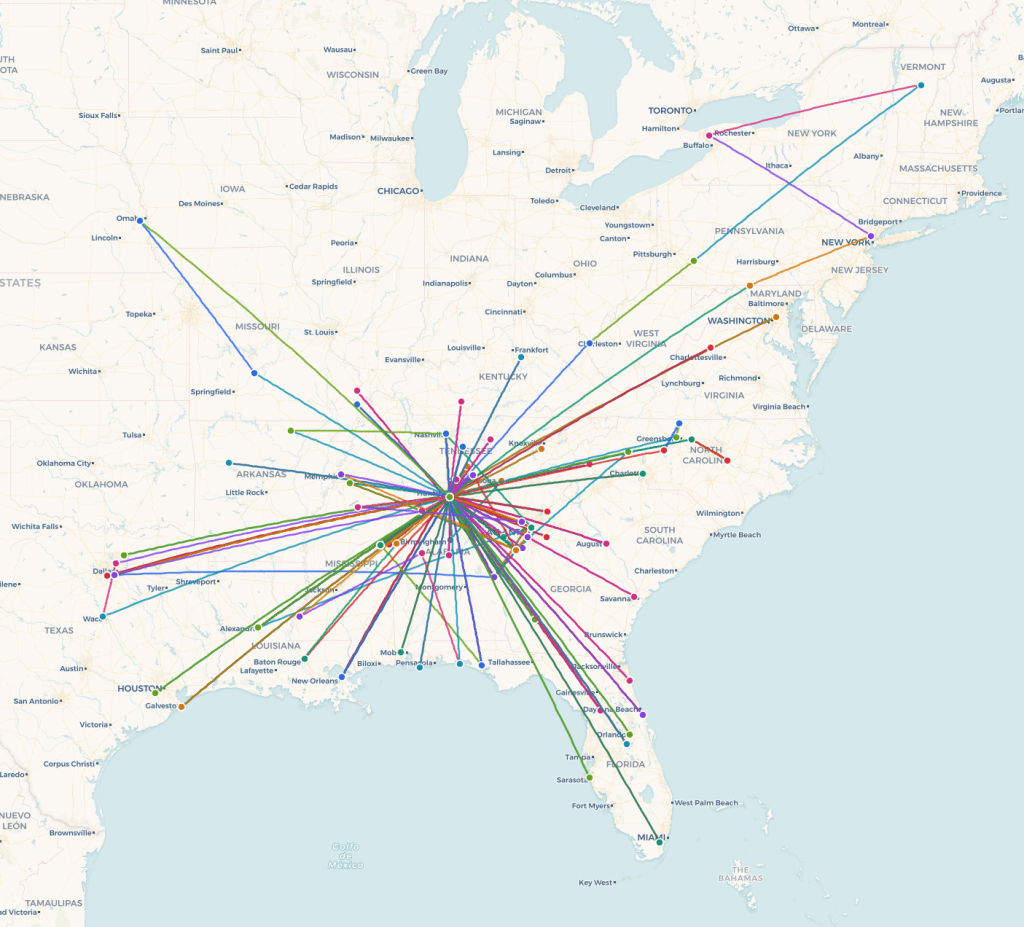
(nb I couldn’t find a good way to generate the map I wanted so I wrote one: check out www.flightmap.online.)
I’ve also flown Angel Flight missions all over the southeast (LA, AR, FL, GA, MS, and TN, at least), ferrying patients who need to get to medical care. I first flew an Angel Flight mission back in 2019, taking a two-year-old boy named Dawson from Enterprise, Alabama to Aiken, South Carolina on his way to heart surgery in Boston. Having a twin-engine airplane that can reliably make these trips in a wider range of weather conditions means I can say “yes” to more missions, and that’s deeply satisfying.
Not without incident
I missed a few trips and had a couple of exciting moments, all for maintenance-related reasons. My first Bahamas trip was aborted because the shop I was using couldn’t finish the required cylinder change in time; the second Bahamas trip was scrubbed due to a brake problem. I missed the opportunity to fly myself to Vegas for work because of a leak in one of the fuel filters, and on a couple of other occasions (like an unexpectedly flat tire!) I had to scramble to get a fix in place. These things have taught me patience, as well as reinforcing the idea that if I really have to be somewhere I need to pad my travel schedule and have an airline ticket in my back pocket for contingency use.
Both “exciting moments” were precautionary engine shutdowns, of the same engine but at different times, due to noticeable engine roughness. The cause turned out to be a clogged fuel injector, itself caused by junk from an improperly sealed fuel strainer. The nice thing about a twin is that a precautionary shutdown is an annoyance and not immediately an emergency.
What’s next
Looking ahead, my goals keep evolving. I’m planning to pursue a seaplane rating, I want to keep up the Angel Flight missions, and 2026 is the year I finally fly myself to the Bahamas. I want to keep learning about Carmen and flying her to new places. After four years, the airplane still surprises me — sometimes with a new squawk, sometimes with a sunset over the clouds that makes me glad I’m up there.
If there’s one thing these four years have taught me, it’s that buying an airplane is not a destination. It’s an ongoing relationship — part mechanical, part financial, occasionally abusive, but entirely worth it.
Happy gotcha day, Carmen.